
Depth Camera
After one year working on the “HW” aka Inmoov robot, it’s time to start working on the head, eyes and brain aka FIAR (Framework for Interactive Robotics). The recommendation from the Inmoov website is to use Kinectic V2 as main depth camera, located on torso-stomach and use standard RGB cameras located on the eye system.
Honestly the new Azure Kinect Dev Kit looks very promising, not only because 4K camera but also because the 7 mic array promising very good quality audio input. At time I’m writing this post, is not available for shipping in Spain :(
Another option I was looking for a long time is Structure Sensor .. that currently offer an OEM version. Looks very nice and small but bit pricy.
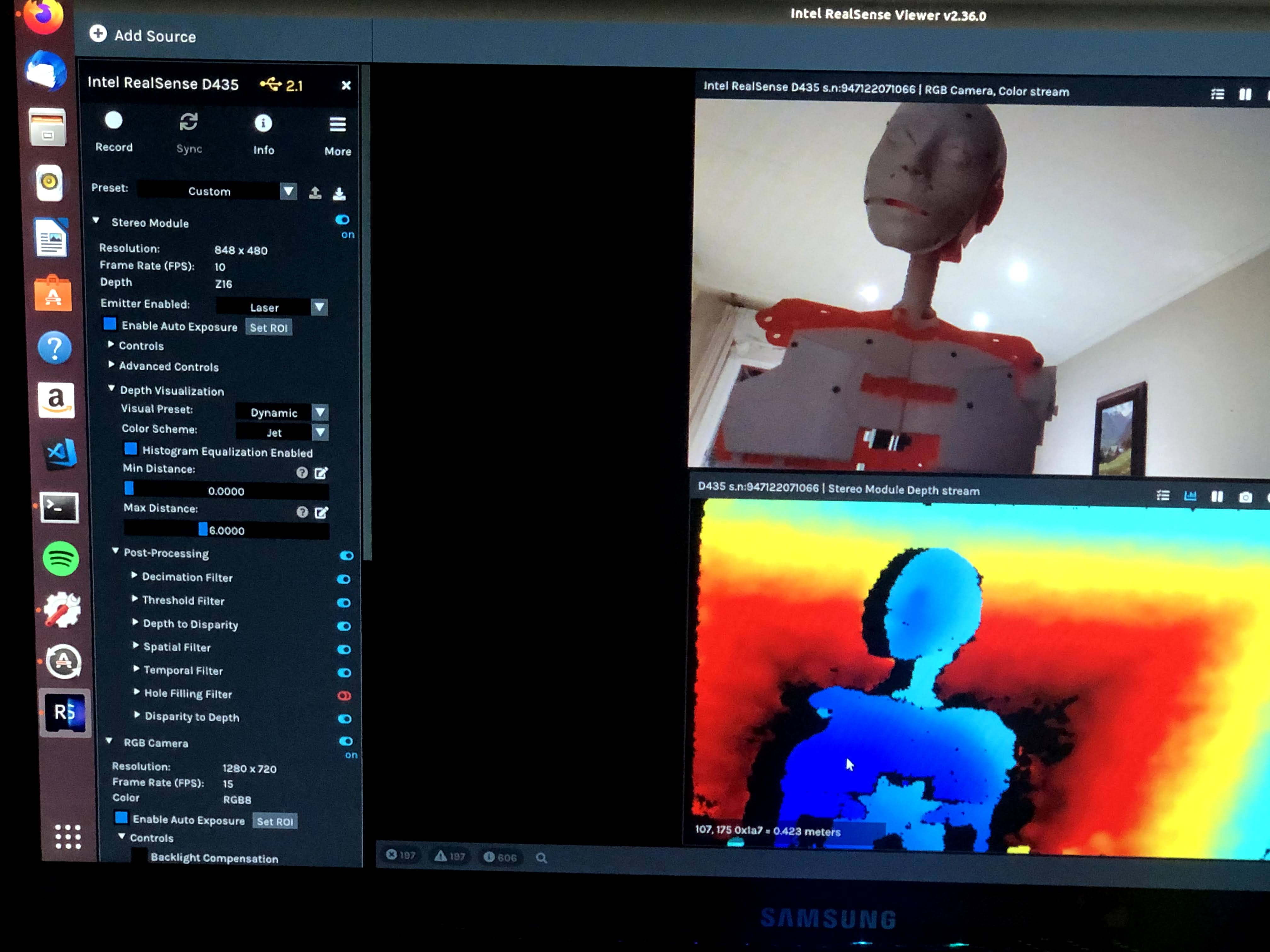
Finally I decided to go for Intel RealSense D435 .. seems good balance between specs and price. Support for Mac OS is not great but good integration with OpenCV and OpenVINO and support for Windows and Linux (Ubuntu 18.04 in my case) is fine.
As usual, don’t forget to support my work on Patreon I’d really appreciate it !